ロボットのナビゲーション技術がハチの飛行から新たなインスピレーションを得ました。小型飛行昆虫は長距離を安定して移動できますが、ロボットは計算コストが高く、大型化しがちです。そこで、ハチの視覚学習飛行に基づいた「ビー・ナブ」という新しいナビゲーション戦略が提案されました。
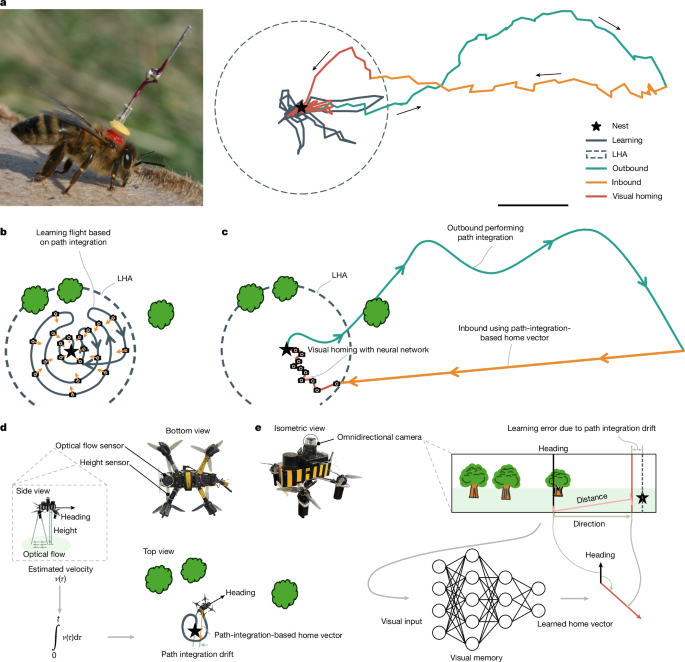
この「ビー・ナブ」では、小さなニューラルネットワークが全方向の画像を基にした経路統合を学習します。これにより、ロボットは家から遠くに飛び立ち、経路統合を使って真っ直ぐ戻ることが可能です。そして、視覚的ホーミングネットワークを用いて、経路統合の誤差を補正します。
シミュレーションでは、このニューラルネットワークは総飛行エリアのわずか0.25~10.00%の訓練で済むことが示されました。実際の実験では、小型ドローンが30~110メートルの距離を飛行し、100%の確率で家から0.5メートル以内に戻ることに成功しました。
この発見は、ロボットのナビゲーション技術を大幅に効率化する可能性があります。特に、計算資源を節約しながら高精度なナビゲーションを実現するための新たな手法として注目されます。
今後の研究では、この技術がどのように他のロボットシステムに応用できるか、さらなる検証が期待されます。


